从一个直观问题开始
在处理音频、语音或其他时间序列数据时,我们几乎一定会遇到这样一个问题:如果两段信号在“内容”上是相似的,但在时间推进的速度上并不一致,我们还能不能判断它们是相似的吗?
这个问题在真实场景中非常常见。例如,两个人唱的是同一段旋律,但一个人唱得偏快、另一个人唱得偏慢;学生在视唱时可能会因为犹豫而放慢速度,唱错后回拉重唱,或者在某些位置突然加速;同一句话,被不同的人用不同的语速、不同的停顿方式说出来。
在这些情况下,如果我们强行要求“第 1 帧对第 1 帧,第 2 帧对第 2 帧”,那么几乎所有真实样本都会被简单粗暴地判定为“不相似”。
DTW(Dynamic Time Warping,动态时间规整) 正是为了解决这一类“时间轴对不上,但内容本质相似”的问题而提出的。它关注的并不是时间点是否严格一致,而是:在允许时间发生伸缩的前提下,两段序列能不能以一种合理的方式对应起来。
DTW 的核心思想:允许时间被拉伸
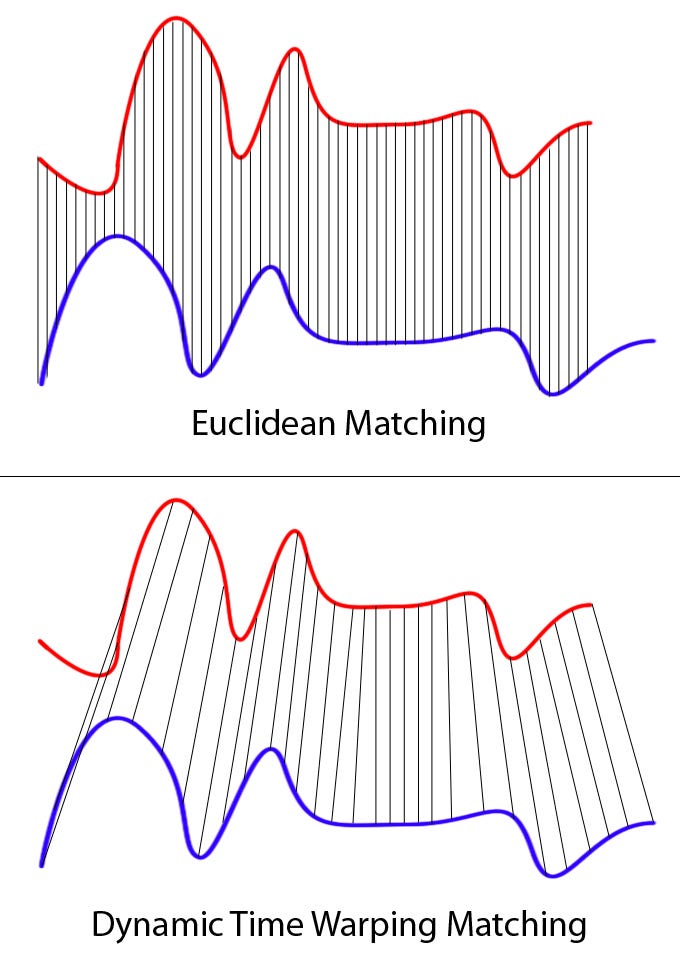
从直觉上看,DTW 的思想并不复杂。它并不要求两段序列在时间上同步前进,而是允许一段序列在某些地方“走快一点”,在另一些地方“走慢一点”,只要整体趋势和形状尽可能一致即可。换句话说,DTW 关注的是“形状是否相似”,而不是“时间是否对齐”。
在数学上,我们通常将两段时间序列表示为:
\[ X = (x_1, x_2, \dots, x_N), \quad Y = (y_1, y_2, \dots, y_M) \]这里的 \(x_i\) 和 \(y_j\) 并不是原始音频采样点,而是在第 \(i\)、第 \(j\) 个时间位置提取到的特征帧。需要注意的是,序列长度 \(N\) 和 \(M\) 并不要求相等,这本身就已经体现了“时间不必同步”的思想。
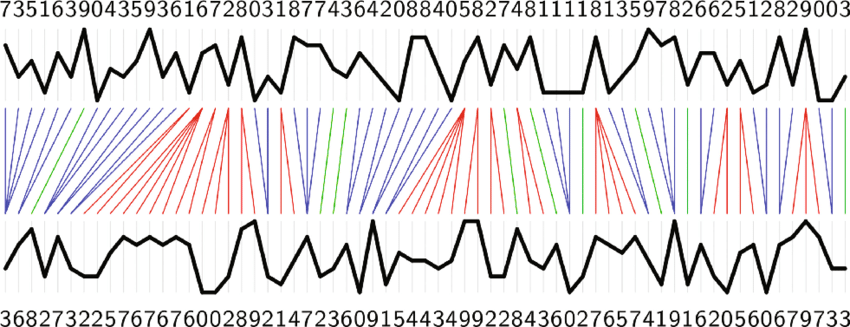
接下来,DTW 会构造一个大小为 \(N \times M\) 的距离矩阵:
\[ D(i, j) = \lVert x_i - y_j \rVert \]你可以把这个矩阵理解为一个全面的对照表:它回答的问题是,“序列 X 在第 \(i\) 个时刻的状态,与序列 Y 在第 \(j\) 个时刻的状态,到底有多不像?”
矩阵中的每一个格子,都是一次潜在的“对齐选择”。
在距离矩阵中“走一条路”
DTW 并不是在距离矩阵中简单地找一个最小值,而是要在整个矩阵中寻找一条从左上角走到右下角的路径。左上角 \((1,1)\) 表示两个序列的起点,右下角 \((N,M)\) 表示两个序列的终点,而路径上经过的每一个格子,都代表了一次“第 \(i\) 帧对齐到第 \(j\) 帧”的决策。
这条路径并不是随意的,它必须满足三个非常直观的约束。首先是单调性:时间只能向前推进,不能回到过去;其次是连续性:路径的每一步只能走到相邻的位置,不能跳跃;最后是边界条件:路径必须完整覆盖两段序列,不能只对齐其中一部分。
在这些约束下,DTW 寻找的是一条累计距离最小的路径:
\[ \mathrm{DTW}(X, Y) = \min_{W} \sum_{(i,j)\in W} D(i,j) \]其中 \(W\) 表示一条合法的对齐路径。直观来说,这条路径描述了“如果允许时间被拉伸或压缩,哪一种对齐方式能让两段序列整体上最相似”。
一个更直观的类比
你可以把 DTW 想象成这样一个过程:两个人分别在地上走出了一串脚印,一个人走得快,脚印之间的间距比较大;另一个人走得慢,脚印密集。如果你要求“第一个人的第 5 个脚印必须对应第二个人的第 5 个脚印”,那几乎不可能对齐。但如果允许某些脚印被“拉开”或“压缩”,只要整体行走方向一致,那么就可以找到一种合理的对应方式。
DTW 正是在做这样一件事情,只不过脚印变成了特征帧,对齐过程被形式化为一条路径搜索问题。
DTW 是否适用于视唱任务?
在视唱任务中,一个经常被提出的质疑是:“DTW 这种算法是不是太老了?”但事实上,这并不是问题的关键。DTW 的核心假设非常简单:**两段序列在本质上是相似的,只是时间推进方式不同。**它并不关心音高是否落在标准音级上,也不要求节奏绝对稳定,更不会主动排斥滑音、颤音或不稳定的起音过程。
因此,在视唱任务中,真正决定 DTW 是否“好用”的,并不是算法本身,而是:我们用什么样的方式来描述学生的演唱行为。
一个常见的失败原因
很多“DTW 不适用视唱任务”的结论,往往源自一条隐蔽但致命的逻辑链:学生的演唱行为本身是连续的、波动的、充满不稳定细节的,但我们选用的特征却假设音高是离散、规范、稳定的。结果就是,DTW 被迫在一个已经失真的表示空间中做对齐,最终自然会得出“效果不好”的结论。
这并不是 DTW 的问题,而是在用一把不合适的尺子,去丈量一个本身就不规则的对象。
什么是特征帧(Feature Frame)?
在 DTW 中,“特征帧”并不是一个可有可无的实现细节,而是整个对齐过程的前提条件。DTW 本身并不理解“声音”“旋律”或“音准”,它所能处理的,始终只是一个向量序列。换句话说,DTW 对齐的不是音频,而是你对音频所做出的某种描述。
在形式上,我们通常假设:每隔 \(\Delta t\) 秒,从音频中提取一次特征,用一个 \(d\) 维向量来表示这一小段时间内的声音状态:
\[ x_i \in \mathbb{R}^d \]其中,\(i\) 是时间索引,\(d\) 是特征维度。一整段音频,最终会被表示为一个随时间变化的向量序列:
\[ X = (x_1, x_2, \dots, x_N) \]DTW 所做的一切计算,全部发生在这个序列空间中。它既不知道这些向量来自人声,也不知道它们对应的是哪个音符;它唯一能做的事情,是根据你定义的距离度量,判断“第 \(i\) 帧”和“第 \(j\) 帧”到底像不像。
因此,一个非常关键、但经常被忽略的事实是:
DTW 的能力上限,完全由特征帧的表达能力决定。
从“连续声音”到“离散帧”的过程
真实的声音在时间上是连续变化的,而特征帧则是对这一连续过程的离散采样。这个过程本身就隐含了一次“建模假设”:我们默认在 \(\Delta t\) 这么短的时间内,声音的状态是相对稳定的,可以被一个向量近似表示。
你可以把这个过程类比为动画制作:肉眼看到的是连续运动,但动画实际上是由一帧一帧静态画面组成的。每一帧画面保留了哪些信息,直接决定了你能不能还原出原本的动作。
在音频分析中也是一样:特征帧决定了你到底“看到了”声音的哪些方面,又忽略了哪些方面。
特征帧并不只是“特征”,而是一种假设
在很多入门资料中,特征帧常常被介绍为“对音频的压缩表示”,但在 DTW 的语境下,更准确的说法是:每一种特征帧,都隐含了一套关于声音行为的假设。
这些假设包括但不限于:
- 声音的哪些属性是重要的;
- 哪些变化可以忽略;
- 哪些变化应当被视为“错误”;
- 不同时间点之间,什么样的差异是“相似的”。
一旦这些假设与真实的演唱行为不匹配,那么即使 DTW 算法本身完全正确,最终的对齐结果也必然是失败的。
常见特征帧及其隐含假设
下面我们来看几种在时间序列对齐任务中常见的特征帧,并重点分析它们各自默认了什么样的声音世界观。
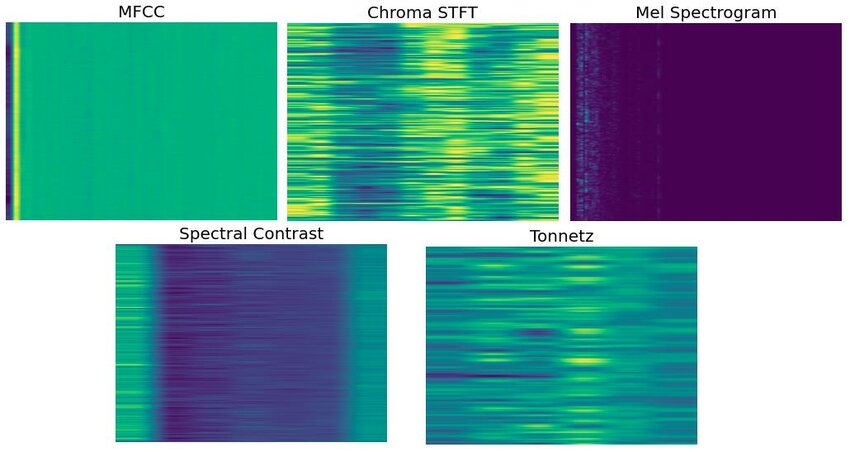
MFCC:假设“音色比音高更重要”
MFCC(Mel-Frequency Cepstral Coefficients)的核心目标,是刻画声音的整体频谱形状,其经典计算流程可以写为:
\[ \text{MFCC} = \text{DCT}(\log(\text{MelSpectrum})) \]从设计初衷上看,MFCC 更关注的是“这个声音听起来像什么”,而不是“这个声音的音高是多少”。它在语音识别中表现优秀,正是因为不同人说同一个词时,音高可能差异很大,但音色和共振结构往往具有一致性。
但在视唱任务中,这种优势反而会变成问题。学生唱得准不准、音程关系是否正确,恰恰是我们最关心的信息,而 MFCC 在计算过程中会主动弱化与绝对音高相关的细节。
结果就是:即使学生整体音高偏移明显,MFCC 序列之间的距离仍然可能很小,从而误导 DTW 认为两段演唱是“相似的”。
Chroma:假设音高是离散且稳定的
Chroma 特征将频率轴压缩到 12 个音级上,其基本形式可以写为:
\[ \text{Chroma}(k) = \sum_{f \in \text{pitch class } k} |X(f)| \]这种表示方式隐含了一个非常强的前提:在任意时刻,声音都可以被明确地归类到某一个音级上。在乐器演奏、和声分析等任务中,这一假设往往是成立的,因此 Chroma 在这些领域表现良好。
但在学生视唱中,真实情况往往恰恰相反。音高可能在音级之间连续游移,起音阶段不稳定,滑音和颤音频繁出现。在这种情况下,Chroma 特征会在相邻音级之间来回跳动,使得时间序列本身呈现出高度不规则的形态。
DTW 并不知道这是“人类演唱的自然波动”,它只能看到一个不断抖动的离散符号序列。
连续基频(F0):最贴近真实演唱行为的表示
如果直接使用基频轨迹作为特征帧,那么每一帧可以简单地表示为:
\[ x_i = f_0(t_i) \]或者进一步转换为音分(cent)尺度:
\[ x_i = 1200 \cdot \log_2\left(\frac{f_0(t_i)}{f_{\text{ref}}}\right) \]这种表示方式几乎不对音高做任何先验约束。它允许音高连续变化,也允许在目标音附近出现偏差,因此能够自然地表达滑音、颤音、跑音以及不稳定的起音过程。从建模角度看,它与真实演唱行为的距离是最近的。
需要注意的是,F0 表示的问题主要不在于“假设是否合理”,而在于工程层面:噪声干扰、基频估计错误、真假声切换以及无声段的处理,都会对特征序列的稳定性产生影响。但这些问题属于信号处理和系统设计的范畴,而不是 DTW 本身的结构性缺陷。
特征帧与 DTW 的真正关系
在理解了不同特征帧的假设之后,可以回到一个非常重要但经常被忽略的结论:
DTW 并不会修正错误的表示,它只会忠实地对齐你给它的东西。
如果特征帧本身就无法表达学生真实的演唱行为,那么 DTW 只是在一个失真的空间中,寻找“最优但依然错误”的路径。反过来,只要特征允许连续变化和不稳定过程,DTW 反而会成为一种极其自然、几乎符合直觉的时间对齐工具。
小结:真正该问的问题
在视唱任务中,真正值得反复思考的并不是“要不要用 DTW”,而是:“我究竟用什么方式,把学生的演唱行为表示成时间序列?”
DTW 本身并不要求演唱是规范的,它只是尽力对齐你提供的那种表示。当特征允许连续变化和不稳定过程时,DTW 反而是一种非常自然、直观且符合直觉的对齐工具。