概述与直观理解
隐马尔可夫模型(Hidden Markov Model, HMM)是一类用于在“状态不可观测”的情况下,对系统演化过程进行建模和推断的概率模型。它解决的核心问题可以概括为一句话:
当真实世界的状态无法被直接观察时,我们是否仍然能够,仅凭观测到的现象,推断出系统最可能的内部状态变化过程?
为了理解这一点,可以从一个经典且直观的思想实验入手。
假设你被关在一个完全封闭的房间中,永远无法看到外界的天气状况。外面每天的真实天气只可能是三种之一:晴天、阴天或下雨。然而,你每天能够获得的唯一信息,是有人递给你一张纸条,上面记录着某个人当天吃了多少个冰淇淋。
你的目标并不是关心冰淇淋本身,而是希望根据这串“冰淇淋数量”的记录,推断外界每天最可能的天气情况,甚至进一步推断天气是如何随时间变化的。
这正是 HMM 所刻画的典型问题结构。
在这个故事中,天气是真实存在但无法直接观测的,而冰淇淋数量是你唯一能够看到的外显现象。HMM 的建模思想,正是通过对这两层信息之间的统计关系进行刻画,来完成"由现象反推本质"的推断过程。
HMM 的三要素结构
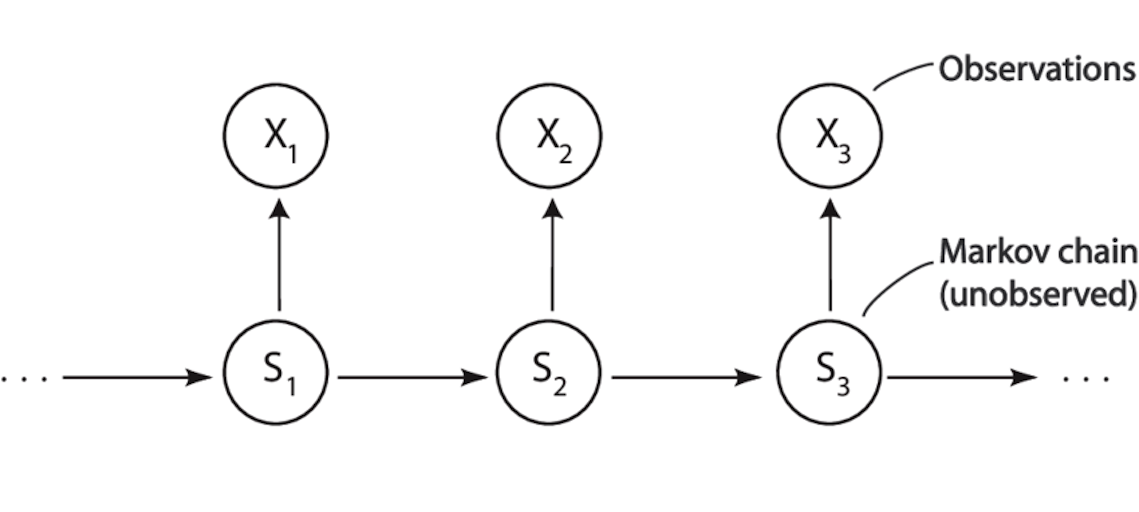
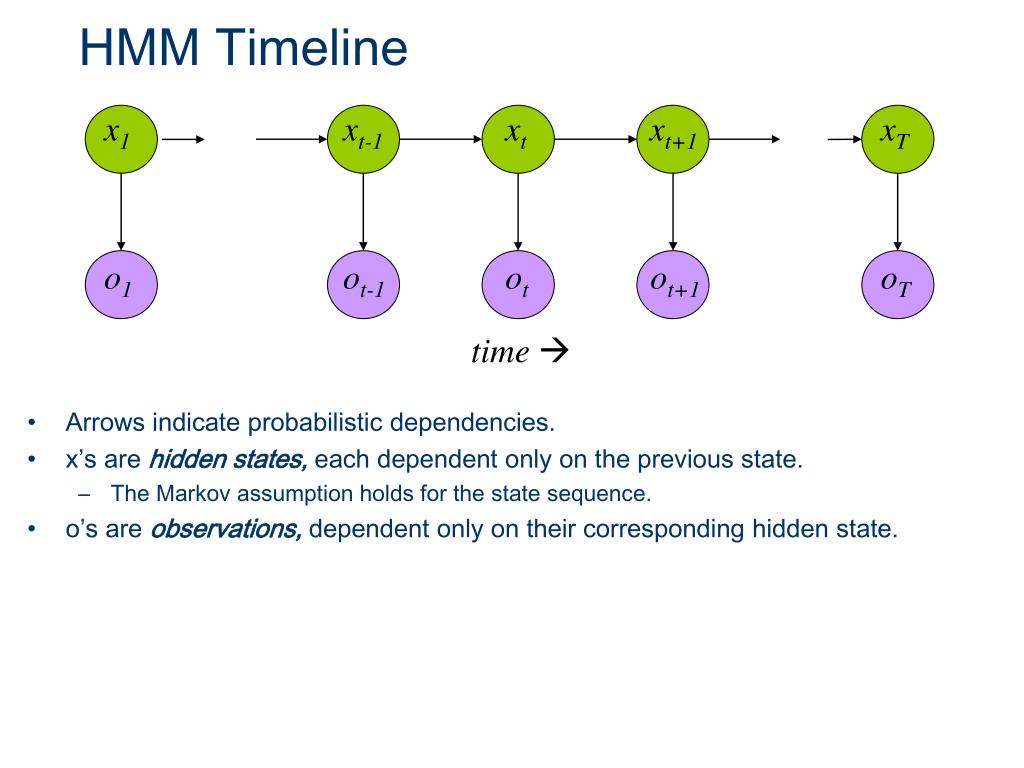
一个标准的 HMM 由三类核心要素构成:隐藏状态、观测值以及它们之间的概率规则。
1. 隐藏状态(Hidden States)
隐藏状态描述的是系统在每一个时间点所处的真实内部状态,但这些状态本身是不可被直接观察到的。
在天气—冰淇淋的例子中,隐藏状态集合可以理解为:
晴天、阴天、下雨
这些状态具有两个重要特征:
第一,它们在现实中确实存在,并且随时间发生变化;
第二,它们不会被直接“暴露”给观察者,而只能通过外在行为或现象间接体现出来。
HMM 的建模目标,正是对这条“看不见的状态序列”进行推断。
2. 观测值(Observations)
与隐藏状态相对的是观测值,即在每一个时间点,观察者能够直接获得的数据。
在本例中,观测值就是每天吃掉的冰淇淋数量,例如:
0 个、1 个、2 个
观测值本身并不是我们最终关心的对象,但它们与隐藏状态之间存在统计关联。正是这种关联,使得“从观测推断状态”成为可能。
3. 概率规则:状态如何演化,现象如何产生
HMM 并不试图通过确定性规则去描述世界,而是通过概率来刻画不确定性。这套概率规则只包含两类。
第一类是状态转移概率,用于描述隐藏状态随时间的演化方式。例如:
如果今天是晴天,那么明天仍然是晴天的概率有多大?变成下雨的概率又有多大?
这一假设反映了一个重要事实:现实世界的状态变化通常具有连续性和惯性,而不是完全随机地跳变。这正是“马尔可夫性”的核心含义——未来只依赖于当前状态,而与更久远的历史无关。
第二类是发射概率(观测概率),用于描述在某个隐藏状态下,观察到特定观测值的可能性。例如:
在晴天,人更有可能吃更多冰淇淋;而在下雨天,吃冰淇淋的概率则显著降低。
隐藏状态并不会直接告诉你"我是谁",它们只会通过观测值"间接露出痕迹"。HMM 正是通过这套概率桥梁,将不可见的状态与可见的现象连接起来。
HMM 要解决的三类核心问题
在明确了 HMM 的基本结构之后(隐藏状态、观测变量、转移概率、发射概率等),接下来的核心问题并不是“模型长什么样”,而是:
在这个模型之上,我们究竟能做哪些推断?
几乎所有关于 HMM 的实际应用——无论是语音识别、序列标注,还是时间序列建模——最终都可以归结为三类本质不同、但彼此紧密相关的问题。HMM 的整个算法体系,正是围绕这三类问题建立起来的。
第一类问题:给定模型,观测序列出现的概率是多少?
第一类问题可以表述为:
在模型参数完全已知的前提下,一段观测序列出现的概率有多大?
用数学语言来说,就是在已知模型参数
的情况下,计算某一观测序列
出现的概率:
这个问题为什么重要?
乍一看,这个问题似乎有些“被动”,只是算一个概率值,但它实际上是 所有其他推断问题的基础:
- 在语音识别中,它可以用来判断“这个模型是否能很好地解释当前输入的语音”;
- 在模型比较时,它可以作为打分函数,判断多个模型中哪一个更合理;
- 在参数学习(第三类问题)中,它是优化目标函数本身。
难点在哪里?
如果直接暴力计算,你需要枚举 所有可能的隐藏状态序列:
\[ Q = (q_1, q_2, \dots, q_T) \]而隐藏状态的数量通常是指数级增长的。这意味着,哪怕模型结构很简单,直接枚举也几乎不可行。
对应的算法
为了解决这个“看似简单但计算上极其昂贵”的问题,引入了 前向算法(Forward Algorithm)。
它的核心思想是:
通过动态规划,把“对所有路径求和”的问题,转化为逐时刻的递推计算。
前向算法并不关心“哪条路径最好”,它做的事情只有一件:
把所有可能路径的概率,合理而高效地加在一起。
第二类问题:给定观测序列,最可能的隐藏状态路径是什么?
第二类问题关注的重点发生了变化:
在观测序列已经给定的情况下,哪一条隐藏状态序列最有可能生成这些观测?
数学上,这等价于求解:
\[ \arg\max_Q P(Q \mid O, \lambda) \]直观理解就是:
“既然这些现象已经发生了,那么幕后最合理的‘状态演化过程’应该是什么?”
这个问题在实际中意味着什么?
这类问题在很多应用中是 真正关心的输出结果:
- 在词性标注中,对应“每个词最可能的词性”;
- 在语音识别中,对应“最可能的音素或状态序列”;
- 在行为建模中,对应“系统在每一时刻最可能处于的内部状态”。
与第一类问题的本质区别
- 第一类问题是 对所有路径求和;
- 第二类问题是 在所有路径中找最大值。
这两者看似相似,但在计算逻辑上是完全不同的任务。
对应的算法
为了解决“找最优路径”的问题,引入了 维特比算法(Viterbi Algorithm)。
它同样使用动态规划,但核心操作不再是“加法”,而是“取最大值”:
- 每一步只保留当前时刻下,到达每个状态的 最优路径;
- 通过记录回溯指针,最终还原整条最优状态序列。
可以把它理解为:
在一张随时间展开的概率图中,寻找一条权重最大的路径。
第三类问题:模型参数未知,能否从数据中反向学习?
前两类问题都有一个重要前提:
模型参数是已知的。
但在真实世界中,这个前提往往并不成立。
于是引出了第三类、也是最具挑战性的问题:
当隐藏状态不可观测、模型参数未知时,是否可以仅凭观测数据,反向估计模型参数?
也就是说,给定一批观测序列:
\[ \{O^{(1)}, O^{(2)}, \dots, O^{(N)}\} \]我们希望学出最合理的:
\[ \lambda = (\pi, A, B) \]为什么这个问题困难?
原因在于一个“死循环式”的依赖关系:
- 要估计参数,似乎需要知道隐藏状态;
- 但隐藏状态本身正是我们不知道的。
换句话说:
我们要在“看不见真相”的前提下,学习描述真相的模型。
对应的算法
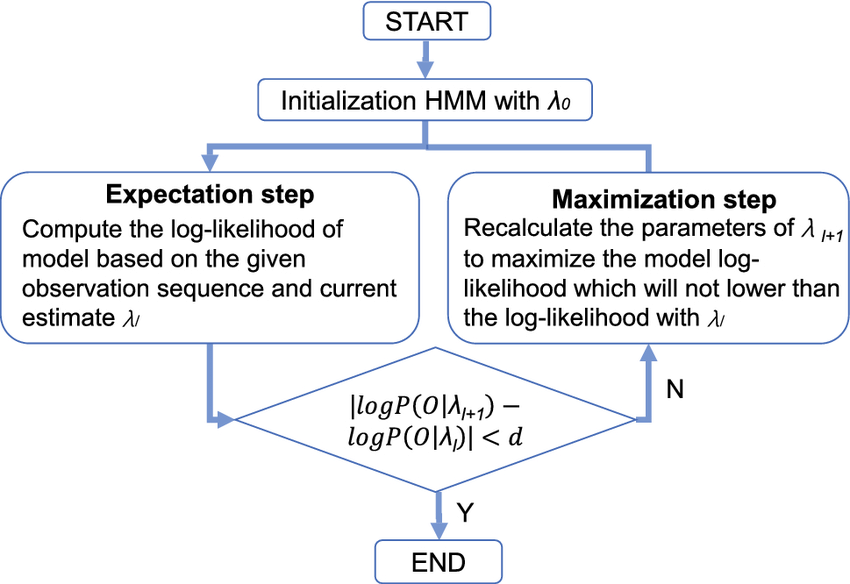
为了解决这一问题,引入了 Baum–Welch 算法,它本质上是 EM(Expectation–Maximization)算法在 HMM 上的特例。
其核心思想可以概括为两步反复迭代的过程:
- E 步:在当前参数下,计算“隐藏状态可能是怎样的”(使用前向–后向算法);
- M 步:在“期望的隐藏状态分布”基础上,重新估计模型参数。
通过不断重复这两个步骤,模型参数会逐步收敛到一个 局部最优解。
三类问题之间的关系
这三类问题并不是彼此孤立的,而是层层递进、相互依赖的:
- 前向算法是 概率评估的基础工具;
- 维特比算法是 最优路径推断工具;
- Baum–Welch 算法则在内部反复调用前向、后向计算,是 参数学习的核心机制。
理解了这三类问题,也就等于理解了 HMM 的整个推断与学习框架。
模型符号与参数设定
设隐藏状态集合为:
$$ S = \{\text{晴}(S), \text{雨}(R)\} $$观测集合为:
$$ O = \{0, 1, 2\} $$初始状态概率定义为:
$$ \pi_i = P(q_1 = i) $$状态转移概率定义为:
$$ a_{ij} = P(q_{t+1} = j \mid q_t = i) $$发射概率定义为:
$$ b_j(o) = P(x_t = o \mid q_t = j) $$一个具体的 HMM 示例
设定初始状态分布为:
$$ \pi_S = 0.6,\quad \pi_R = 0.4 $$状态转移矩阵为:
$$ A = \begin{bmatrix} 0.7 & 0.3 \\ 0.4 & 0.6 \end{bmatrix} $$这表示天气具有一定的稳定性,但仍然存在转变的可能。
发射概率如下:
晴天:
$$ b_S(0)=0.1,\quad b_S(1)=0.4,\quad b_S(2)=0.5 $$雨天:
$$ b_R(0)=0.6,\quad b_R(1)=0.3,\quad b_R(2)=0.1 $$观测序列
假设连续三天观测到的冰淇淋数量为:
$$ x_{1:3} = [2, 1, 0] $$Forward(前向算法)
前向算法的目标是计算在当前模型参数下,整段观测序列出现的概率。
其核心思想在于:虽然隐藏状态不可见,但我们可以对所有可能的状态路径进行概率累加。为了避免对路径进行指数级枚举,前向算法采用动态规划进行递推计算。
定义前向变量:
$$ \alpha_t(i) = P(x_{1:t}, q_t = i) $$它表示在第 \(t\) 天结束时,观测到前 \(t\) 天所有数据,且系统处于状态 \(i\) 的联合概率。
初始化阶段:
$$ \alpha_1(i) = \pi_i \cdot b_i(x_1) $$代入数值可得:
$$ \alpha_1(S) = 0.30,\quad \alpha_1(R) = 0.04 $$递推公式为:
$$ \alpha_t(j) = \left( \sum_i \alpha_{t-1}(i)\cdot a_{ij} \right) \cdot b_j(x_t) $$计算结果为:
$$ \alpha_2(S)=0.0904,\quad \alpha_2(R)=0.0342 $$ $$ \alpha_3(S)=0.007696,\quad \alpha_3(R)=0.028584 $$最终观测序列的概率为:
$$ P(x_{1:3}) = 0.03628 $$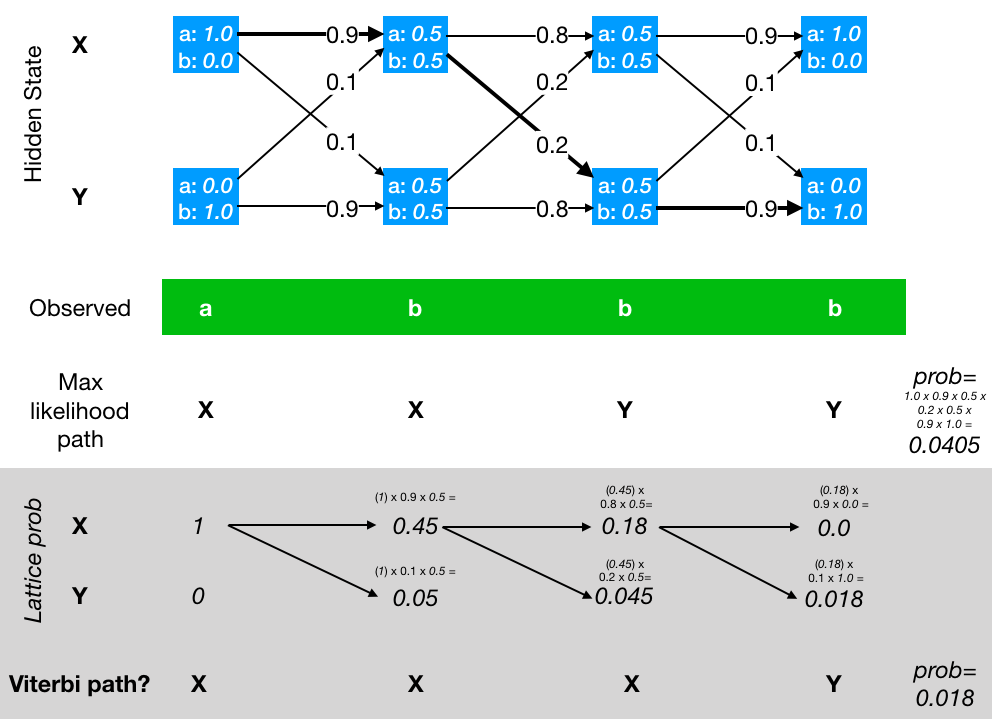
Viterbi(维特比算法)
与前向算法对所有路径求和不同,维特比算法关注的是哪一条隐藏状态路径最可能。
定义最优路径概率:
$$ \delta_t(j) = \max P(q_{1:t-1}, q_t = j, x_{1:t}) $$并引入回溯指针:
$$ \psi_t(j) = \arg\max \left( \delta_{t-1}(i)\cdot a_{ij} \right) $$最终回溯得到的最优状态路径为:
$$ [S, S, R] $$这与直觉高度一致:前两天吃得较多,更符合晴天;最后一天几乎不吃冰淇淋,更符合雨天。
Baum–Welch(EM 训练算法)
当模型参数未知时,可以通过 Baum–Welch 算法从观测数据中自动估计这些参数。该算法是 EM 框架在 HMM 上的具体实现。
其核心思想是交替进行两步:
E 步,在当前模型下估计每个时间点属于各个隐藏状态的概率; M 步,利用这些"软统计结果"重新更新模型参数。
后向变量定义为:
$$ \beta_t(i) = P(x_{t+1:T} \mid q_t = i) $$状态后验概率为:
$$ \gamma_t(i) = \frac{\alpha_t(i)\beta_t(i)} {\sum_k \alpha_t(k)\beta_t(k)} $$参数更新公式如下:
$$ \pi_i \leftarrow \gamma_1(i) $$ $$ a_{ij} \leftarrow \frac{\sum_{t=1}^{T-1} \xi_t(i,j)} {\sum_{t=1}^{T-1} \gamma_t(i)} $$ $$ b_j(o) \leftarrow \frac{\sum_{t: x_t=o} \gamma_t(j)} {\sum_{t=1}^{T} \gamma_t(j)} $$小结
从整体上看,隐马尔可夫模型并不是由某一个“孤立的算法”构成的,而是围绕着“如何在不可观测的世界中进行推断”这一核心目标,形成了一套彼此配合、逻辑闭合的算法体系。
前向算法解决的是概率评估问题。在模型参数已知的前提下,它回答的是:“当前模型对这段观测数据的解释能力有多强?”这一问题本身并不直接给出路径或决策结果,但它为模型比较、模型选择以及参数学习提供了最基础的量化依据。可以说,前向算法定义了“什么叫做一个模型在概率意义上是合理的”。
维特比算法关注的则是结构性解释问题。在观测序列已经发生这一既定事实下,它不再关心所有可能性的总体概率,而是试图给出一条最具代表性的隐藏状态演化路径。它提供的是一种“单一路径层面的解释”,使得 HMM 不仅能回答“有多可能”,还能回答“最可能是怎样发生的”。
而 Baum–Welch 算法进一步将视角从“推断”推进到了“学习”。在隐藏状态完全不可观测的现实条件下,它通过反复估计隐藏状态的期望分布,并据此更新模型参数,使得 HMM 可以仅依赖观测数据完成自我调整与优化。这一过程使模型从静态假设,转变为能够随数据不断修正的动态系统。
从逻辑关系上看,这三类算法并非并列存在,而是层层递进、相互依赖的:
前向(及后向)算法提供了对隐藏状态不确定性的概率刻画;
维特比算法在此基础上给出最优解释路径;
Baum–Welch 算法则反复调用概率评估结果,实现参数层面的学习。
正是这三者的协同作用,使得隐马尔可夫模型不仅“形式上完整”,而且在推断、解释与学习三个层面上形成了一个自洽且可操作的统一框架。